Nav-Studio
Home
Products
Services
Tools
Imprint


SatNavTrajectory
SatNavTrajectory is a SW-tool for generation of 6DOF-trajectories for GNSS simulations.
The trajectory editor supports the generation of time series data from simple vehicle commands.
Steering errors as well as physical medium and instrument errors can be defined and switched on or off.
Contact requests please to: contact@nav-studio.de
Functionalities:
- Modelling of different vehicle-models: aircraft, car, helicopter, motorcycle, ship, zeppelin
- Generation of 6DOF trajectory data (position, velocity, acceleration, Euler-angles and -rates)
- Generation of the trajectory via typical manoeuvre commands (like "straight" or "turn")
- Separate configurability of model execution rate and output data rate
- Application of configurable steering errors
- Application of configurable instrument errors
- Realistic consideration of the medium (wind Beaufort-scale, sea state Douglas-index)
- Physical air/wind environmental model for airplane, helicopter, and zeppelin
- Physical inertial movement model for ships
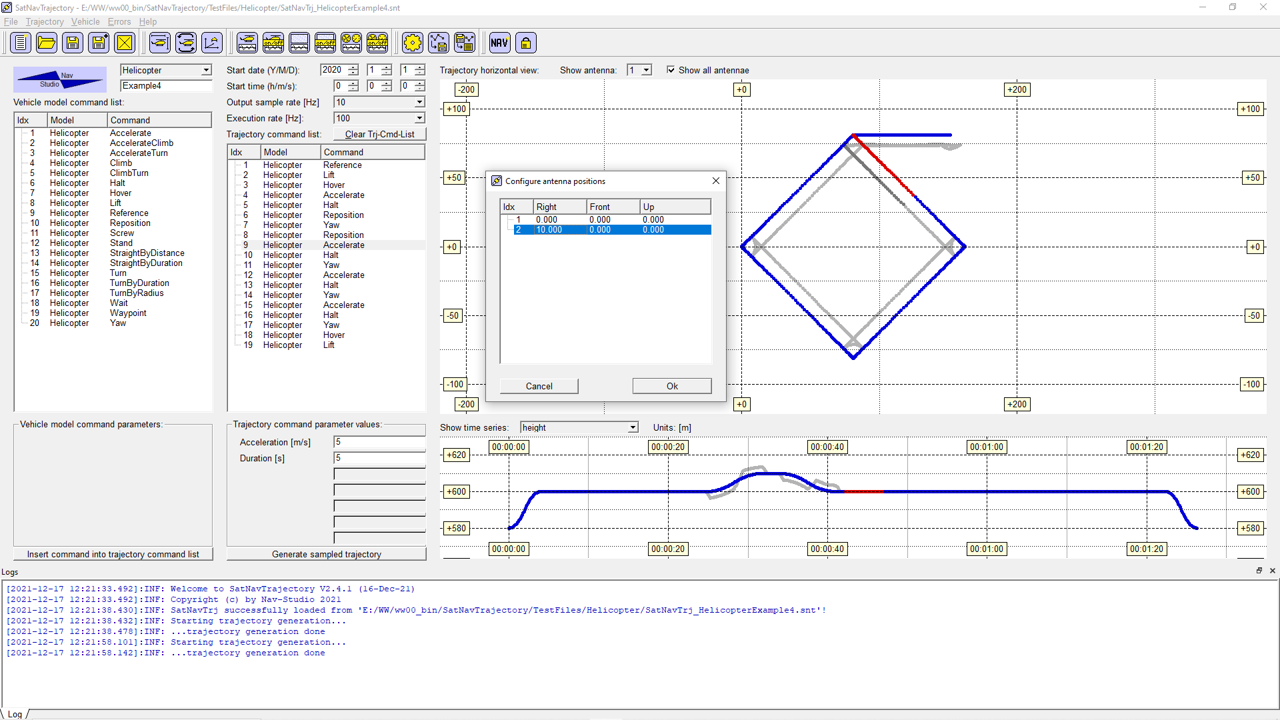
- Consideration of antenna position offsets
- Consistent multi-antenna simulation
- Additional helicopter commands like "hover", "lift", "reposition", and "yaw"
- Support of additional output formats like KML and GPX
- Command "waypoint" for all vehicle models
- Command "navpoint" for aircraft model
- Capture-algorithm for generation of command-lists and 6DOF-trajectories from positions
- Composite turns consisting of clothoide, circle, clothoide
- Three-phase "climb" command with accelerations
- Additional time-series analysis capabilities (e.g. vertical or lateral accelerations)
- Import/export of NMEA position data
- Import/export of Flightradar24 CSV data
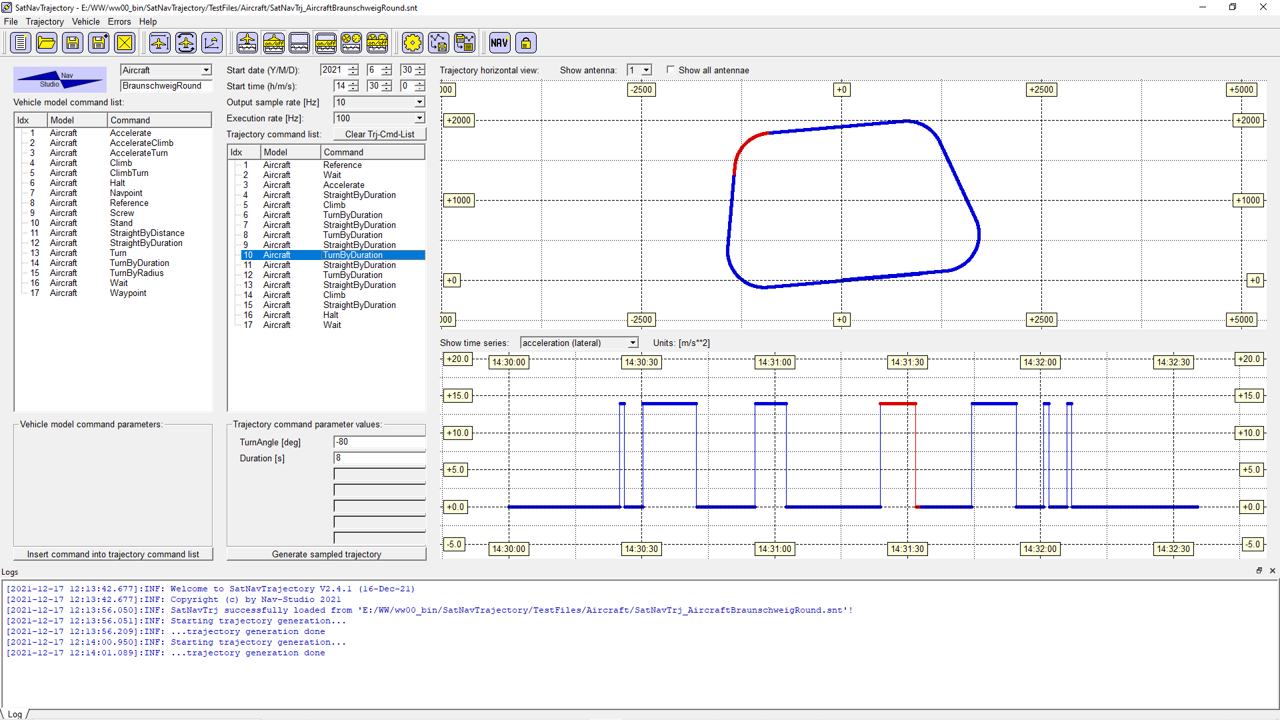
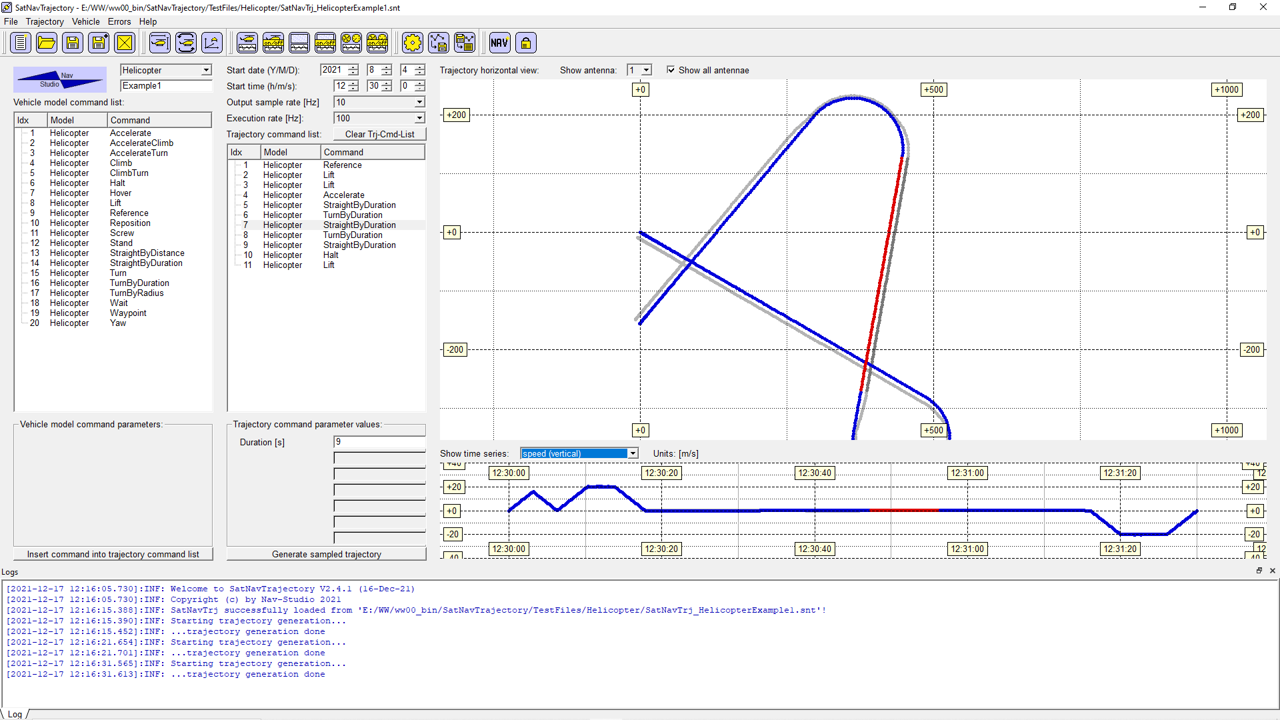
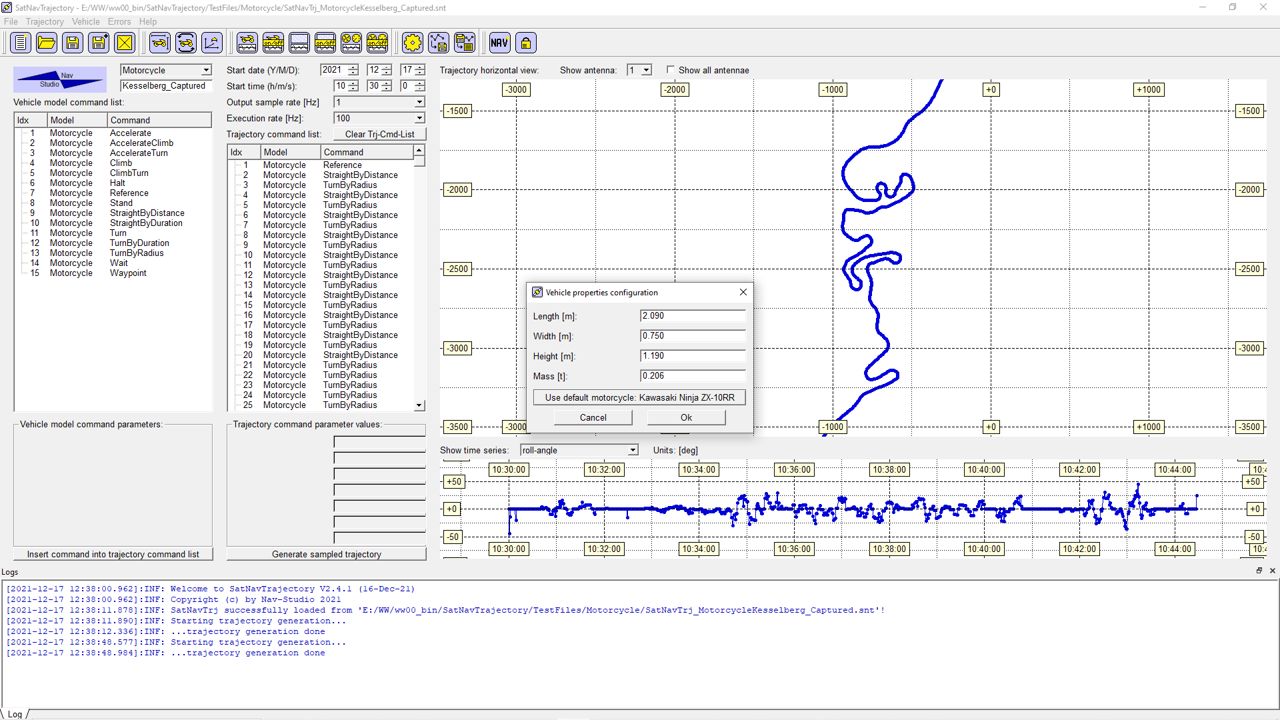
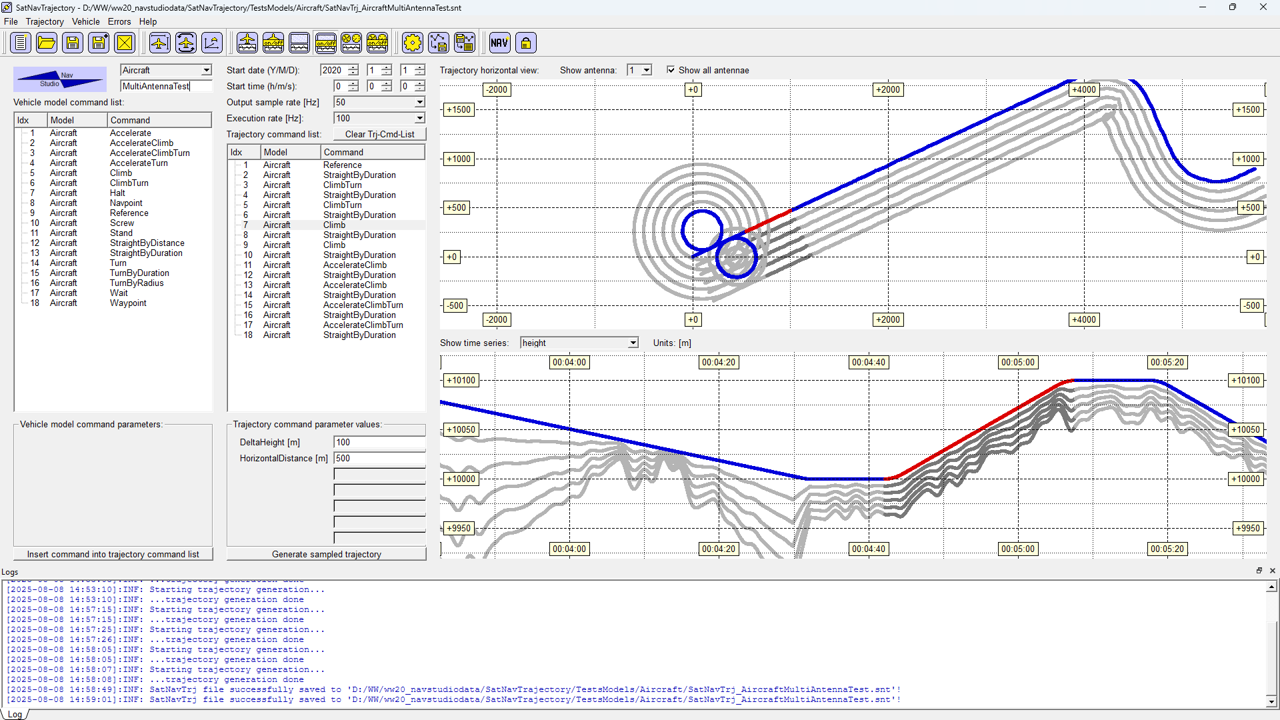
The friendly user interface allows a simple configuration of the desired trajectory.
Effects of the individual vehicle commands on the trajectory are displayed in a
highlighted way. All additional errors can be configured and be switched on and off
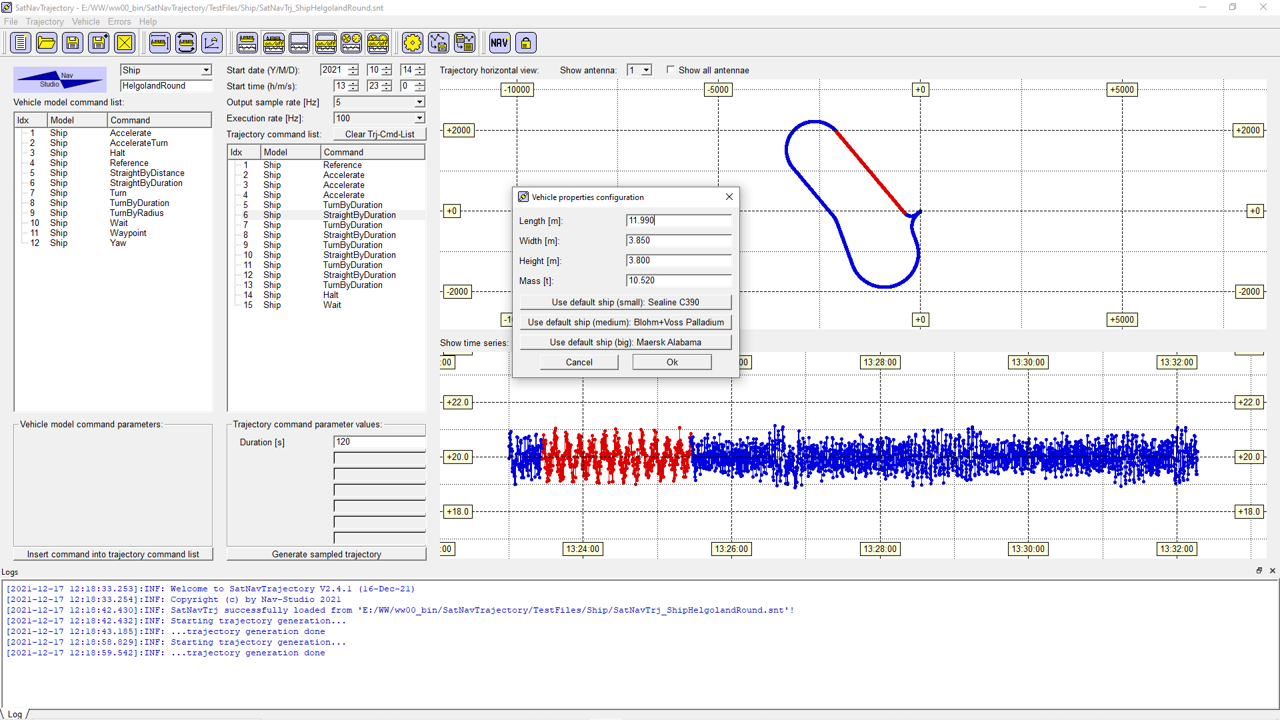
via simple tool buttons. Dynamic parameters of different vehicle models are already
pre-defined and can be used directly or be adapted as needed.
Details:
- Output of trajectories as 6DOF-files (per antenna)
- Model execution rate and output sample rate up to 1000 Hz
- Export and import of vehicle command-lists
- Visualisation of trajectory, height and speed
- Visualisation of acceleration and Euler angles
- Additional pre-defined vehicle models
- Based on MSVC 2022 V17.14.11 and Qt V6.2.0
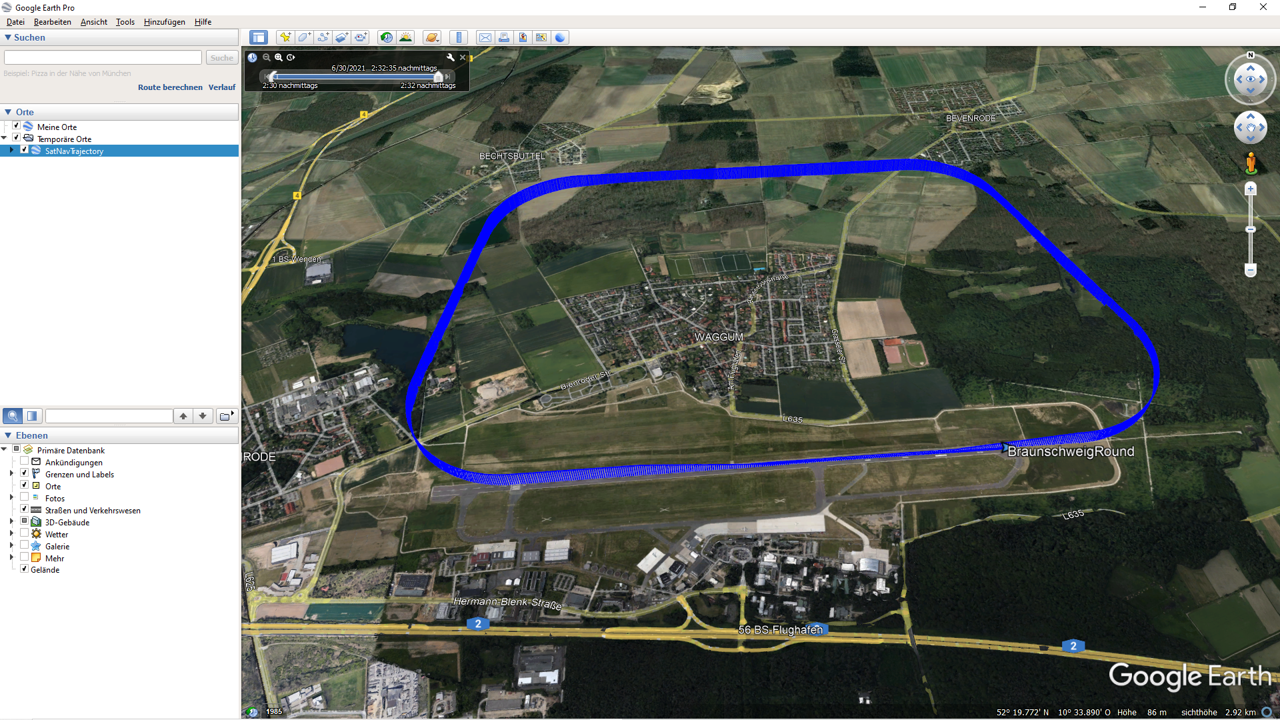
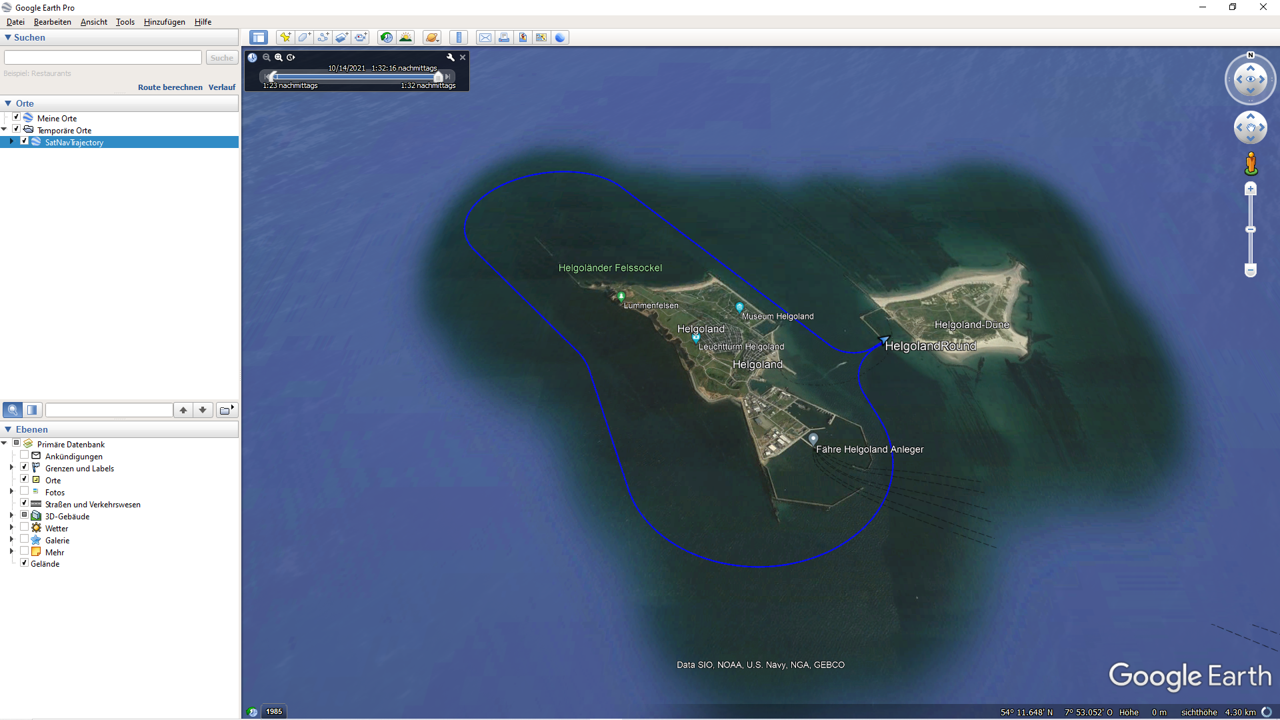
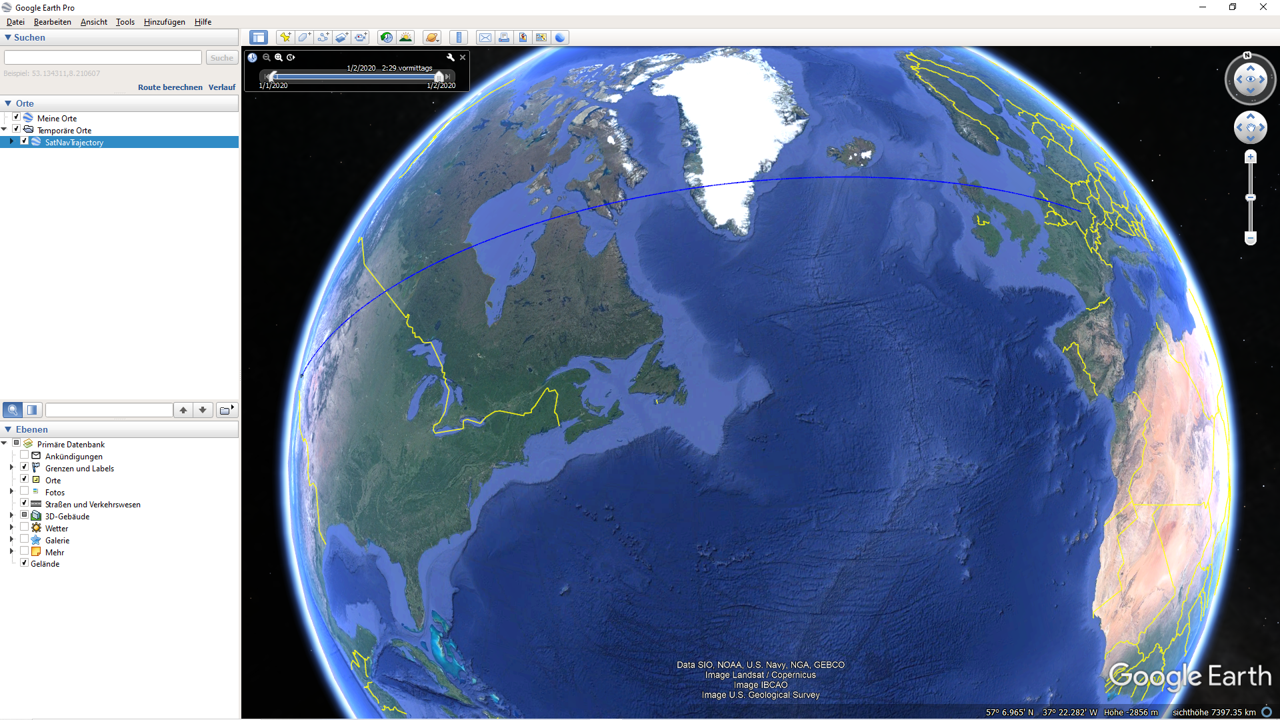
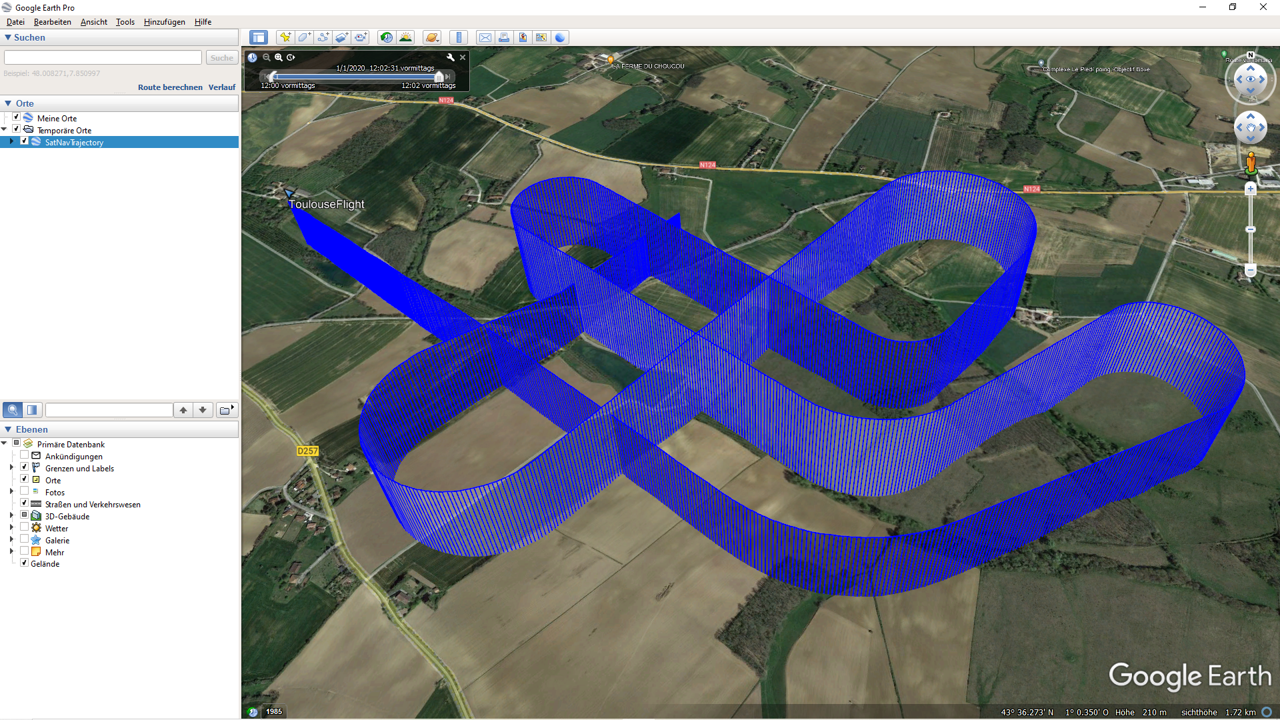
The KML output format allows a visualisation of the generated trajectories e.g. in Google Earth:
SatNavTrajectory will be maintained and improved on a long-term basis.
Now available: SatNavTrajectory V2.8
Contact requests please to: contact@nav-studio.de
Last change of this page: 2025.08.08